Internship Overview
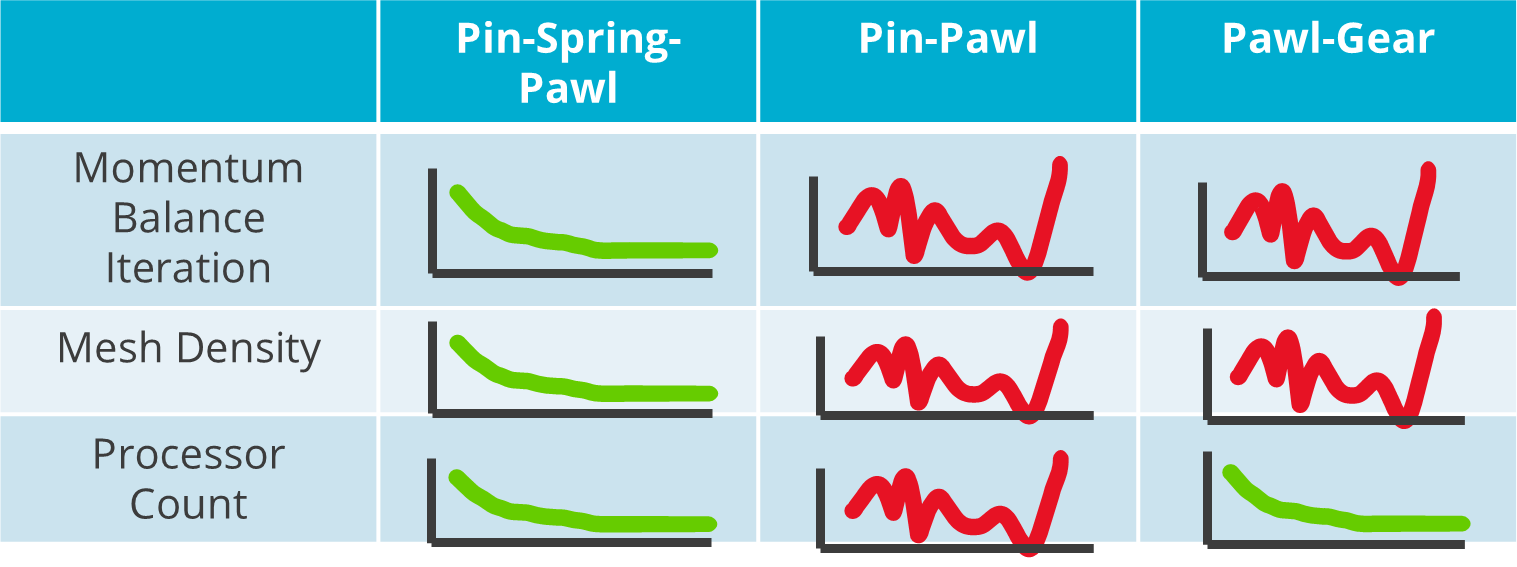
Summer 2025 internship work on a watch-like ratcheting mechanism, focused on separating physical response from sensitivity introduced by finite-element setup choices. NOMAD stands for Nonlinear Mechanics and Dynamics Research Institute; Alan's internship ran June 16-August 8 in Albuquerque through Sandia National Laboratories and the University of New Mexico, with the final NOMAD presentation delivered August 5, 2025. The public record includes the IMAC-accepted coauthored paper, final NOMAD presentation, Alan's Soft Robotics Lab presentation, completed results matrix, and mechanism/FEA media extracted from the final deck.